浅谈强化学习的深度学习方法
本文将引入强化学习这一领域,并简要介绍一些基础的理论建模,及其深度学习的解法,例如 Deep Q Learning 和 Policy Gradient 。
问题背景
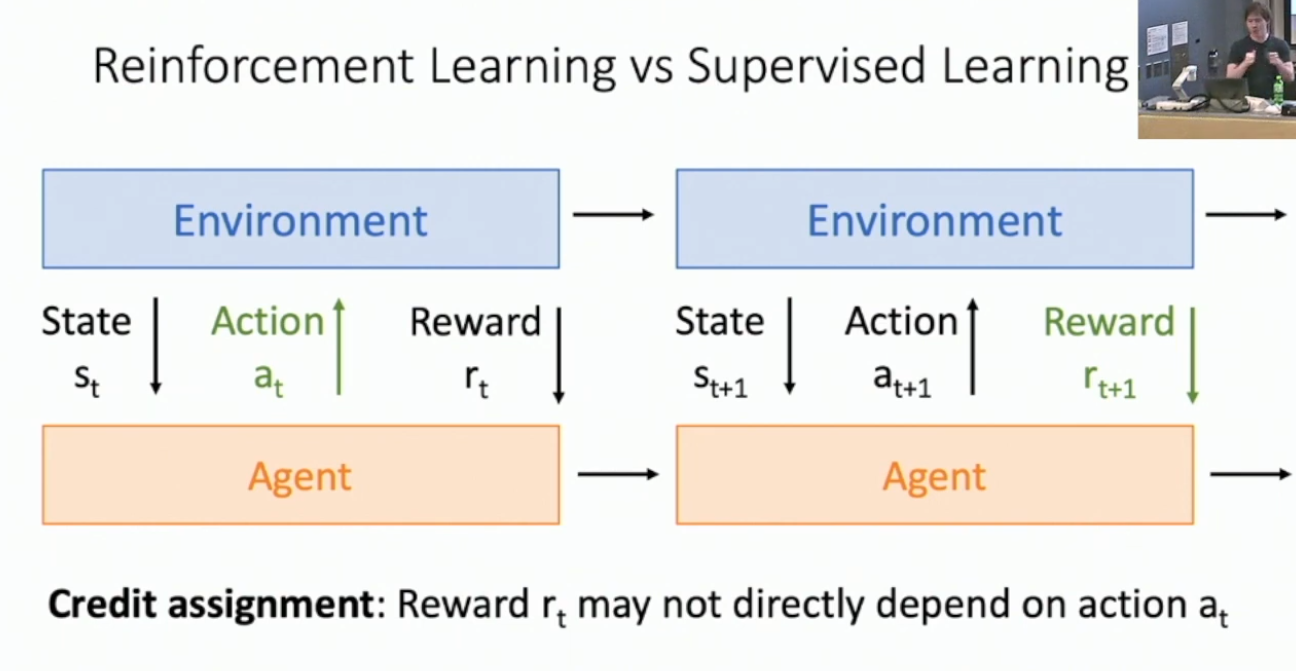
总的来说,强化学习是一个相当难的问题,显著的难于我们之前所建模的问题。简单的说,强化学习的目标是训练一个依据某种规则与外界交互的模型。一个合理的建模是,设想存在某个外部环境,以及某个我们希望训练的模型。该模型每次从环境中获取当前环境的状态
,然后做出自己的行动 ,该行动对环境造成影响,同时环境要向模型发送奖励 。接下来环境和模型都会变化,并进行下一轮交互,以此类推。 
你可能会觉得这个问题建模看起来和之间的监督学习有点像,因为监督学习反正也是模型和数据集交互。但强化学习有一些本质的困难之处,例如:
- 随机性。环境可能会随机改变。
- 我们可能不知道是哪一步行动导致了当前的奖励,即奖励会受先前的行动影响。
- 不可微。先前的模型中我们总是希望通过梯度手段来调整模型,而强化学习的过程不一定是可微的。
- 环境不稳定。随着模型的行动,外界环境可能会发生较大的改变,导致模型先前收集到的信息、学习到的方式难以适用于新环境。更严格的说,外界环境对应的分布不是一个稳定的分布。
马尔可夫决策过程与 Deep-Q Learning
现在我们将简要介绍强化学习的数学建模之一,马尔可夫决策过程。我们使用一个
元组来描述马尔可夫决策过程的状态空间,即 ,其中: :环境的所有可能状态的集合。 :模型的所有可能行动的集合。 :给定 时奖励的分布。 :给定 时,下一步转移到的状态的分布。 :衰减系数。
特别的,我们要求当前状态
完全描述了外部环境,即给定 时分布 和 就完全确定了。我们将该性质称作马尔可夫性。我们的目标是让模型学习某一策略 ,使其最大化长期的收益: 其中 代表第 步的奖励, 即为衰减系数。因此,衰减系数的作用主要有两个,其一是使得模型在一定程度上更为关注较近的奖励,其二也潜在的帮助长期收益收敛。而模型在马尔可夫决策过程中的行动模式则是: - 当
,环境从给定的初始的状态分布,记作 ,中取样,得到初始状态。 - 接下来,模型不断重复:
- 模型根据策略
,从分布 中取样得到当前行动 。 - 环境从分布
中取样得到当前奖励 。 - 环境从分布
中取样得到下一状态 。 - 模型接受奖励
并转移到下一状态 。
- 模型根据策略
当然,这是一个随机过程,所以我们无法期待稳定的收益。因此,我们的优化目标应是给定策略
时的最大期望收益,也就是: 在给定策略 时,我们希望衡量某一个状态的优劣,为此我们定义价值函数: 有时我们希望衡量在当前状态 下采取行动 时的收益,为此进一步定义 函数: 现在我们考虑最优的 函数,即: 现在我们就要做一些假设了。1一般来说,我们认为 应是一个分布,然而此处我们假设每一步仅做确定性的选择,即令 为一 的函数。这样,我们可以期待: 现在考虑如何求解 ,我们期待 满足递推关系,而这一点其实应该是有保障的,即如下的 Bellman Equation : 其中 。实际上我们期待 Bellman Equation 满足一些更强的性质。我们不加证明的给出:2 对于任一满足 Bellman Equation 的
,其必然恰为最优的 。 考察函数列:
,其中 为任意 ,满足: 有 一致收敛到 。
要求解
,一个简单的思路是我们直接按照如上性质,从任意初始函数开始做迭代。然而 的定义域可能很大,使得这一方法无法实现。此处我们考虑引入神经网络来预测 ,并使用 Bellman Equation 作为损失函数。即,假设我们使用参数为 的网络预测 ,得到 。考虑: 我们期待 ,即设定损失函数为: 其中的期望则通过对 做取样来近似。当然,以上的叙述仍是相当粗糙的,有一些比较重要的技术细节,例如如何选择训练时的 mini batch 、如何取样,我们都不会在这里深入。不过以后我们可能会考虑以 Alpha Zero 为例来实现 MCTS + Deep-Q Learning 。
策略梯度方法
在以上的 Deep-Q Learning 中,我们假设了
,并使用函数 来描述 。这样,我们可以通过学习 来间接的学习 。而此处的 policy gradient 则更加直接,即我们希望通过某种方法直接学习 的分布,具体的手段是使用神经网络和梯度方法。具体的,我们考虑训练一个模型,使其对于输入的状态 ,预测策略的分布 。记模型参数为 ,则由这些参数所描述的策略的期望收益为: 我们希望通过梯度上升来调整 从而最大化收益。即: 我们会采取对实际行动做有限的取样来近似期望,然而取样过程是不可微的,因此我们需要一些技巧。我们考虑由参数 所指定的,状态与行动序列 的分布 。我们有: 考虑: 假设求导是可交换的: 注意到: 因此: 进一步: 这是一个相当好的形式。具体的,设想我们通过若干次对行动序列取样来近似期望。在每一次取样中,我们进行有限步行动。其中 可以在取样时计算;并且每当我们使用模型预测 ,我们都对 进行反向传播以计算其梯度。这样,我们就得到了可微的最终形式,使得我们可以用梯度方法来优化 。3 当然,Policy Gradient 方法还有一些潜在的技术细节,这里无意深入。
- 标题: 浅谈强化学习的深度学习方法
- 作者: RPChe_
- 创建于 : 2025-04-16 00:00:00
- 更新于 : 2025-06-23 21:05:01
- 链接: https://rpche-6626.github.io/2025/04/16/DL/RL/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。